















TAILLE & PERFORMANCE
| Surface de travail | 1330 x 2700mm |
| Encombrement général | 1750 x 3150 x 1250mm |
| Hauteur de rétractation Z | 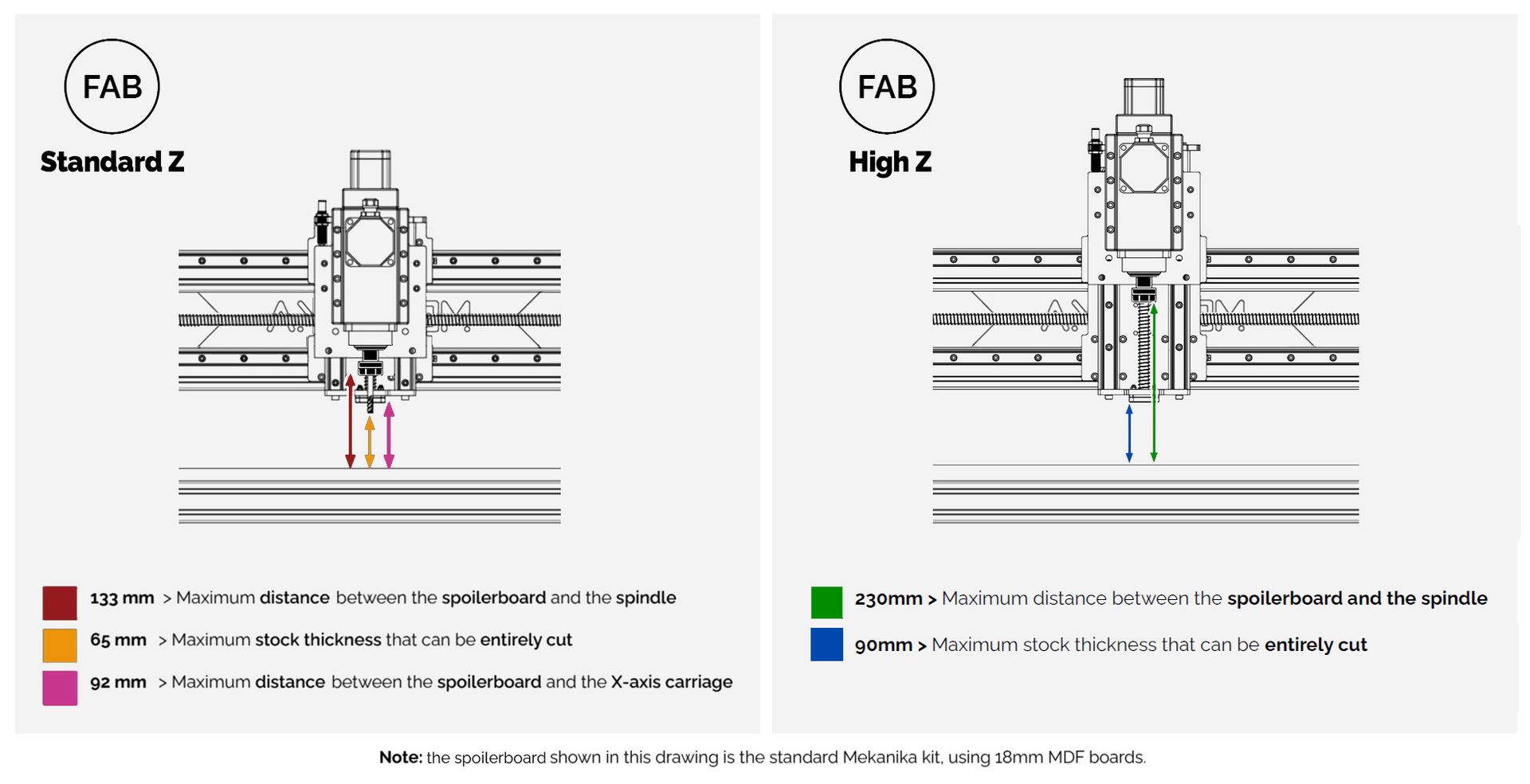 |
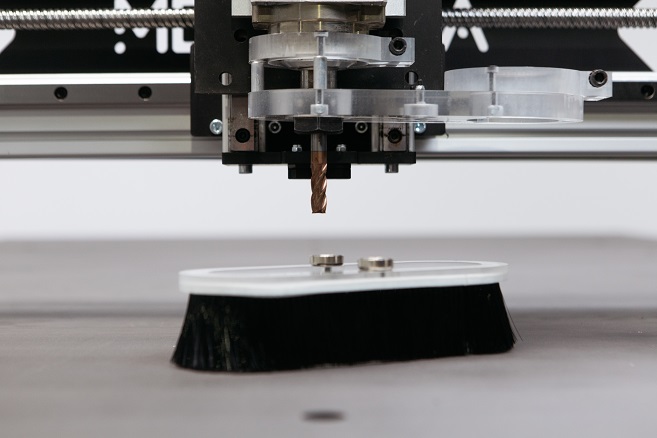
| Paramètres de coupe typiques (bois tendre) | - Vitesse avance: 7000 mm/min - Profondeur de passe: 5 mm - Vitesse de rotation broche: 20,000 rpm - Fraise carbure 3 dents 6mm |
| Vitesse axiale max. | 25,000 mm/min |
| Vitesse traverse max. | 30,000 mm/min |
Précision de coupe typique | 0.1 mm * *cette valeur dépend fortement de l'outil, de la matière usinée et des paramètres de coupe utilisés |
Précision de positionnement | X & Z-axis : ± 50 µm / 300 mm Y-axis: ±26 µm / 1000 mm |
| Broche | - Puissance de 2,2 kW - Refroidie à air - Vitesse de 5000 à 24000 tr/min - Automatique (DI) |
| Consommation électrique | 1x 230VAC (max. 3.5 kW avec broche, +0,55 kW avec aspiration) |
MÉCANIQUE
| Structure | - Plaques d'acier (8 & 10mm) - Profiles en aluminium (30x60mm & 60x60mm) |
| Système de guidage linéaire | Double rail prismatique HGR20 |
| Système d'entrainement | |
| Axes X et Z | Vis-à-bille 16 mm±50 µm / 300 mm (C7) |
| Axe Y | Rack et pignon Mod 2 ±26 µm / 1000 mm (DIN5 / Q5) |
ÉLECTRONiQUE
| Moteurs | - Nema34, 6 A, 4.5 Nm (X & Y) - Nema23, 5 A, 2.2 Nm (Z) |
| Système d'entraînement | - 32-bit DSP - 72 VDC 8,4 A - Microstepping 1/32 - Contrôle de courant à l’arrêt - Coefficient de lissage de la vitesse (accélération/décélération) |
| Ordinateur embarqué | Raspberry Pi 4B (2 Gb RAM) |
| Ports | - 3 ports USB - 1 port Ethernet - 1 port HDMI |
| Connecteurs | - Neutrik XLR (moteurs/senseurs) - GX12 (entrées/sorties) |
| Unité d'interfaçage (pas comprise) | Écran tactile capacitif de 13,3 pouces et clavier de commande mobile |
| Connectivité | - WiFi (2.4 GHz and 5.0 GHz IEEE 802.11ac ) - Bluetooth (5.0) - Gigabit Ethernet |
| Capteurs de limite | Capteurs inductifs (6x) |
| Capteur de longueur d'outil | T- Plaque tactile avec pince crocodile |
| Logiciel de contrôle CNC | PlanetCNC Mk3/4 |
LOGICIEL DE CONTRÔLE
| PlanetCNC TNGv2 | - Générateur/éditeur de G-code intégré - Visualisation des parcours d'outils - Importation de parcours d'outils à partir de fichiers 2D (dxf, png,...) - Interpolation avancée des mouvements - Mode simulation - Mode d'entrée manuelle des données (MDI) - Déplacement automatique et portique d'équerre - Mesure automatique de la longueur de l'outil et palpage - Priorité à l'avance et à la vitesse - Vue, scripts et M-codes personnalisables |
| Compatibilité CAO | Compatible avec tous les logiciels de FAO disponibles sur le marché (Autodesk Fusion360 recommandé) |